MATRICES Y SISTEMAS DE
ECUACIONES LINEALES
Suma o adición de matrices
Para sumar dos matrices A Y B han de ser de las mismas
dimensiones; si esto es cierto, la suma es una matriz E de iguales dimensiones
que A y que B, y sus elementos se obtienen sumando los elementos
correspondientes de A y B.

Estas matrices se pudieron sumar
porque, ambas son del mismo tamaño.
Actividad
Para obtener los elementos de una
matriz C, se suman los elementos correspondientes de la matriz A y B es decir:

No se puede aplicar la suma en estas
matrices ya que la magnitud de las mismas no cumple la regla establecida.
Producto de matrices por un escalar
Así como se ha definido la suma de matrices, también se puede formar el producto de un número real A y una matriz A, el resultado, denotado por A es la matriz cuyos elementos son los componentes de A multiplicados por A.
Si K=5 Y B=KA
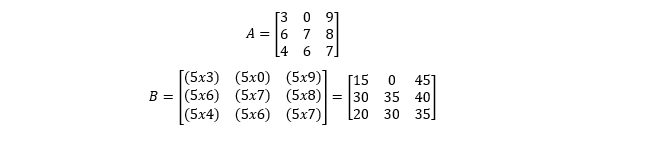
Sea una matriz A de dimensión m.n y un escalar λ se puede definir al producto de una matriz A por el escalar para dar sentido a la operación A+A+A+…+A el producto se obtiene multiplicando cada elemento de la matriz A por el escalar λ,λ_A y sus elementos.
Demuestre que A+A =2A

Multiplicación de matrices
Dos matrices A y B son conforme a ese orden (primero A y
después B), si A tiene el mismo número de columnas que b tiene de filas.

ACTIVIDAD 2
Los tres hijos de un granjero Amy, Beth y Chad atienden tres
puestos al lado de la carretera durante los meses del verano. Un fin de semana,
todos venden sandias, calabaza amarilla y jitomates. Las matrices A y B tabulan
la cantidad de libras de cada uno de los productos vendidos por cada uno de los
hijos en el sábado y domingo.



Dada
las siguientes matrices: efectué si es posible:
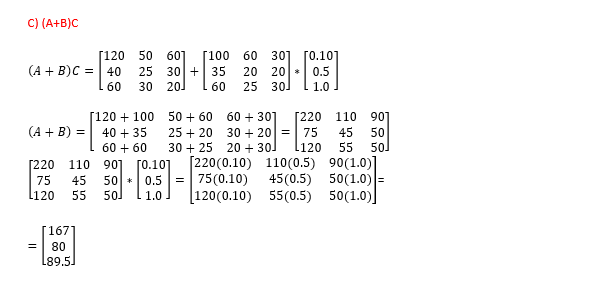
a) ABE
b )DB+DC
c) A^3



Vectores
Las matrices donde M>1 y N =1 (es decir, están formadas por una sola columna) son llamadas matrices columna o vectores , de igual manera, si M=1 y N>1, se tiene una ,matriz fila o vector, los vectores se denotaran con las letras minúsculas en negritas :B,X, etc, en estos casos no será necesario la utilización de doble subíndice para la identificación de sus elementos y un vector X de M elementos (en columna) queda simplemente como:




El producto escalar de dos vectores no es otro vector sino un número. Se
determina multiplicando las coordenadas de ambos vectores, componente a
componente y sumando los resultados. Por ejemplo:
(-3,2) x (5,1) = ((-3) x5) +(2x1) = -15+2 = -13
Propiedades de la suma de Vectores:
Conmutativa
A * b = b * a
Asociativa
(a + b) * c = a * (b + c)
SOLUCIÓN DE SISTEMAS DE ECUACIONES
LINEALES
GRAN NÚMERO DE PROBLEMAS PRÁCTICOS DE INGENIERÍA SE REDUCE AL PROBLEMA DE RESOLVER UN SISTEMA DE ECUACIONES LINEALES. POR EJEMPLO, PUEDEN CITARSE LA SOLUCIÓN DE SISTEMAS DE ECUACIONES NO LINEALES, LA APROXIMACIÓN POLINOMIAL, LA SOLUCIÓN DE ECUACIONES DIFERENCIALES PARCIALES, ENTRE OTROS .
SOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES
Gran número de problemas prácticos de ingeniería se reduce al problema de resolver un sistema de ecuaciones lineales. Por ejemplo, pueden citarse la solución de sistemas de ecuaciones no lineales, la aproximación polinomial, la solución de ecuaciones diferenciales parciales,entre otros.
CLASIFICACIÓN DE UN SISTEMA SEGÚN EL NÚMERO DE SOLUCIONES

•Discutir un sistema es decidir a cuál de estas tres categorías pertenece
SISTEMAS EQUIVALENTES
Dos sistemas de ecuaciones lineales son equivalentes si tienen exactamente las mismas soluciones.
Transformaciones que convierten un sistema en otro equivalente:
I.- Multiplicar o dividir ambos miembros de una ecuación por un número distinto de cero.
II.- Sumar a una ecuación del sistema otra ecuación del mismo.
III. Eliminar una ecuación que es combinación lineal de otras dos.
Resolución de sistemas de ecuaciones
Resolver un sistema es encontrar todas sus soluciones o decidir que no tiene ninguna.
Métodos de resolución:
1. Método de Gauss.
2. Método de Cramer.
3. Método de la matriz inversa.

 El
método de Gauss para resolver un sistema de ecuaciones lineales consiste en
obtener de un sistema:
El
método de Gauss para resolver un sistema de ecuaciones lineales consiste en
obtener de un sistema:
ELIMINACIÓN DE GAUSS
Matrices inversibles.
Una matriz cuadrada que posee inversa se dice que es inversible o regular; en
caso contrario recibe el nombre de singular.
-
Propiedades de la
inversión de matrices
1. La matriz inversa, si existe, es única.
Observación. Existen matrices que cumplen
A·B = I, pero que B·A¹ I, en tal caso, se dice que A es la inversa de B “por la
izquierda” o que B es la inversa de A “por la derecha”.
RESOLUCIÓN DE SISTEMAS: MÉTODO DE GAUSS

Un sistema equivalente y escalonado,
mediante transformaciones adecuadas.
Se pueden dar los siguientes pasos:
I.
Si es necesario
reordenar ecuaciones para que a11 sea distinto de cero.
II. Dividir la primera
ecuación por a11 y restar a cada ecuación un múltiplo de la primera para eliminar
todos los elementos que quedan por debajo de a11x1.
III.
Repetir los pasos
anteriores basados ahora en a22 (y si es necesario en cada aii).
IV.
El proceso termina
cuando no quedan más ecuaciones.

REGLA
DE CRAMER
Esta regla establece que cada incógnita de un sistema de ecuaciones lineales algebraicas puede expresarse como una fracción de dos determinantes con denominador d y con el numerador obtenido a partir de d, al reemplazar la columna de coeficientes de la incógnita en cuestión por las constantes b1, …b2,…, bn. por ejemplo, x1 se calcula como:

DETERMINANTES
Solución de un sistema de 3x3
La matriz del sistema es:

DESCOMPOSICIÓN LU
RECORDEMOS, QUE UNA MATRIZ REGULAR A, ADMITE UNA FACTORIZACIÓN DE LA FORMA
PA=LU
DONDE P ES UNA MATRIZ DE PERMUTACIÓN DE FILAS, L ES UNA MATRIZ TRIANGULAR INFERIOR Y U ES UNA MATRIZ TRIANGULAR SUPERIOR. Y SEA EL SISTEMA DE ECUACIONES [A][X]=[B] AUNQUE LA ELIMINACIÓN GAUSS REPRESENTA UNA FORMA SATISFACTORIA PARA RESOLVER TALES SISTEMAS,
RESULTA INEFICIENTE CUANDO DEBEN RESOLVERSE ECUACIONES CON LOS MISMOS COEFICIENTES [A], PERO CON DIFERENTES CONSTANTES DEL LADO DERECHO (LAS B). LOS MÉTODOS DE DESCOMPOSICIÓN LU SEPARAN EL TIEMPO USADO EN LAS ELIMINACIONES PARA LA MATRIZ [A] DE LAS MANIPULACIONES EN EL LADO DERECHO {B}. UNA VEZ QUE [A] SE HA “DESCOMPUESTO”, LOS MÚLTIPLES VECTORES DEL LADO DERECHO {B} SE PUEDEN EVALUAR DE MANERA EFICIENTE.
UNA ESTRATEGIA DE DOS PASOS
1. PASO DE DESCOMPOSICIÓN LU. [A] SE FACTORIZA O “DESCOMPONE” EN LAS MATRICES TRIANGULARES INFERIOR [L] Y SUPERIOR [U].
2. PASO DE LA SUSTITUCIÓN. [L] Y [U] SE USAN PARA DETERMINAR UNA SOLUCIÓN {X} PARA UN LADO DERECHO {B}. ESTE PASO, A SU VEZ, SE DIVIDE EN DOS. PRIMERO, LA ECUACIÓN [L][D]=[B], SE USA PARA GENERAR UN VECTOR INTERMEDIO {D} MEDIANTE SUSTITUCIÓN HACIA ADELANTE. DESPUÉS, EL RESULTADO SE SUSTITUYE EN LA ECUACIÓN[L][X]-[D]=0, LA QUE SE RESUELVE POR SUSTITUCIÓN HACIA ATRÁS PARA {X}.
BIBLIOGRAFIA:
APUNTES DE MÉTODOS NUMÉRICOS DE LA PROFESORA LORENA ALONSO


No hay comentarios:
Publicar un comentario